








在该设计中的AGV自动牵引承重机器人主要依靠顶部承重托盘与前段机械臂,实现对定制货架上货物的搬运与其他载货框的托载功能。而AGV分拣机器人则是整合了扫描与分拣的功能,更是优化了整个微型物流集散空间的设计,动力系统采用了两个电机后轮与两个舵机前轮结构。

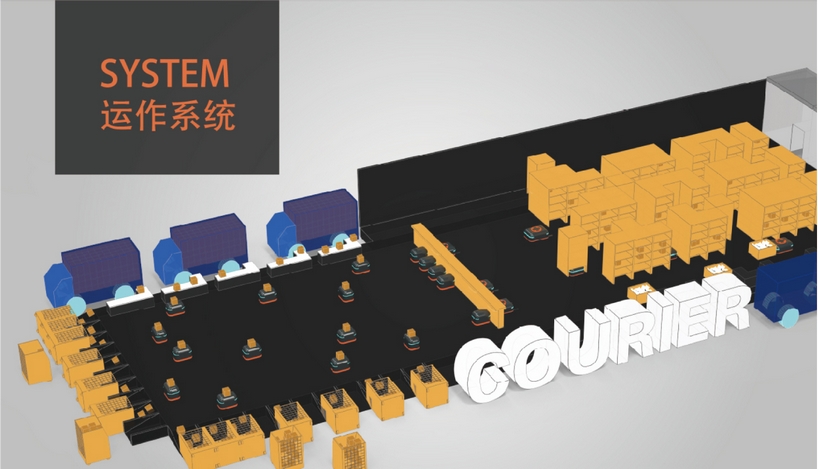

在动力供应上,我们采用空闲时自动充电的模式。在行驶过程中,我们使用了红外避障系统与循迹模块,来模拟机器的使用情况。


以上不仅能极大地节省快递收件员的精力,也能最大程度的降低成本满足中小型快递集散中心的需求。解决当前AGV自动牵引小车使用过程中的弊端与不便,促进快递物流行业向自动化、智能化方向健康地持久地发展。

