








瑞士苏黎世联邦理工学院(ETH Zurich)的研究人员已经成功打造出一个称为Anymal的四足机器人,专为在具有挑战性的环境中进行自主操作而设计。Anymal由特殊的指令系统和精确的扭矩控制执行器驱动,该系统能够让机器人进行动态运行和高移动性的爬升等行为,Anymal机器人展示其已经学会的使用电梯的技能,令人印象深刻。

Anymal机器人搭载激光传感器和摄像头,可以感知其身处的环境,并且会不断创建地图并进行精确定位
Anymal机器人搭载激光传感器和摄像头,可以感知其身处的环境,并且会不断创建地图并进行精确定位。基于这些信息,它可以自主地规划其导航路径,并在行走时仔细选择立足点。

Anymal四足机器人,能跑能爬,首次实际应用就是检查野外的油气现场的管路和设备,Anymal搭载续航可以超过2小时自主操作的电池以及光学和热像仪,麦克风,气体检测传感器和主动照明等不同的感应设备。机器总重量不到30公斤,可用于工厂室内或室外场地检查和具体操作任务,可用于自然地形或碎片区域的搜索和救援任务,还可用在动画和娱乐表演中,它可以完成爬行、跑步、跳舞、爬升等各项动作。

Anymal搭载支撑自主操作两个多小时的电池

将机器人的四条腿折叠储存非常便利
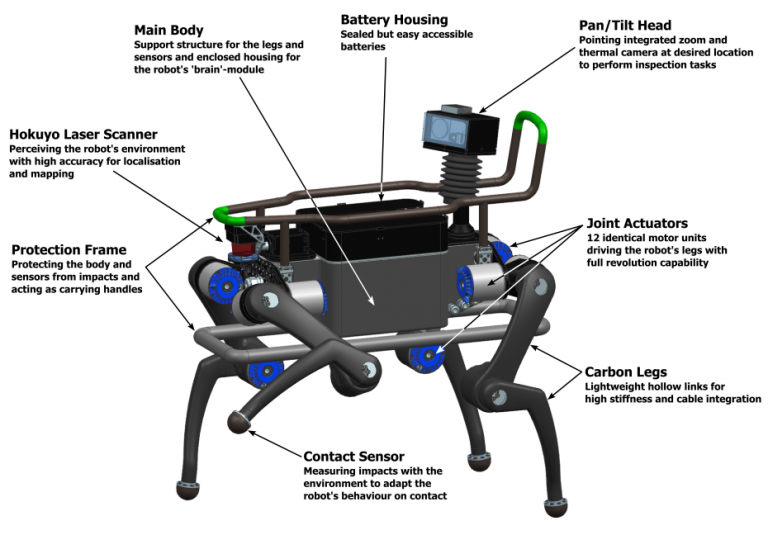
ANYmal的功能和特点介绍

